
Overcoming Common Pitfalls to Improve the Accuracy of Crop Residue Burning Measurement Based on Remote Sensing Data

Abstract
1. Introduction
1.1. Challenges to Measuring CRB with Remotely Sensed Data
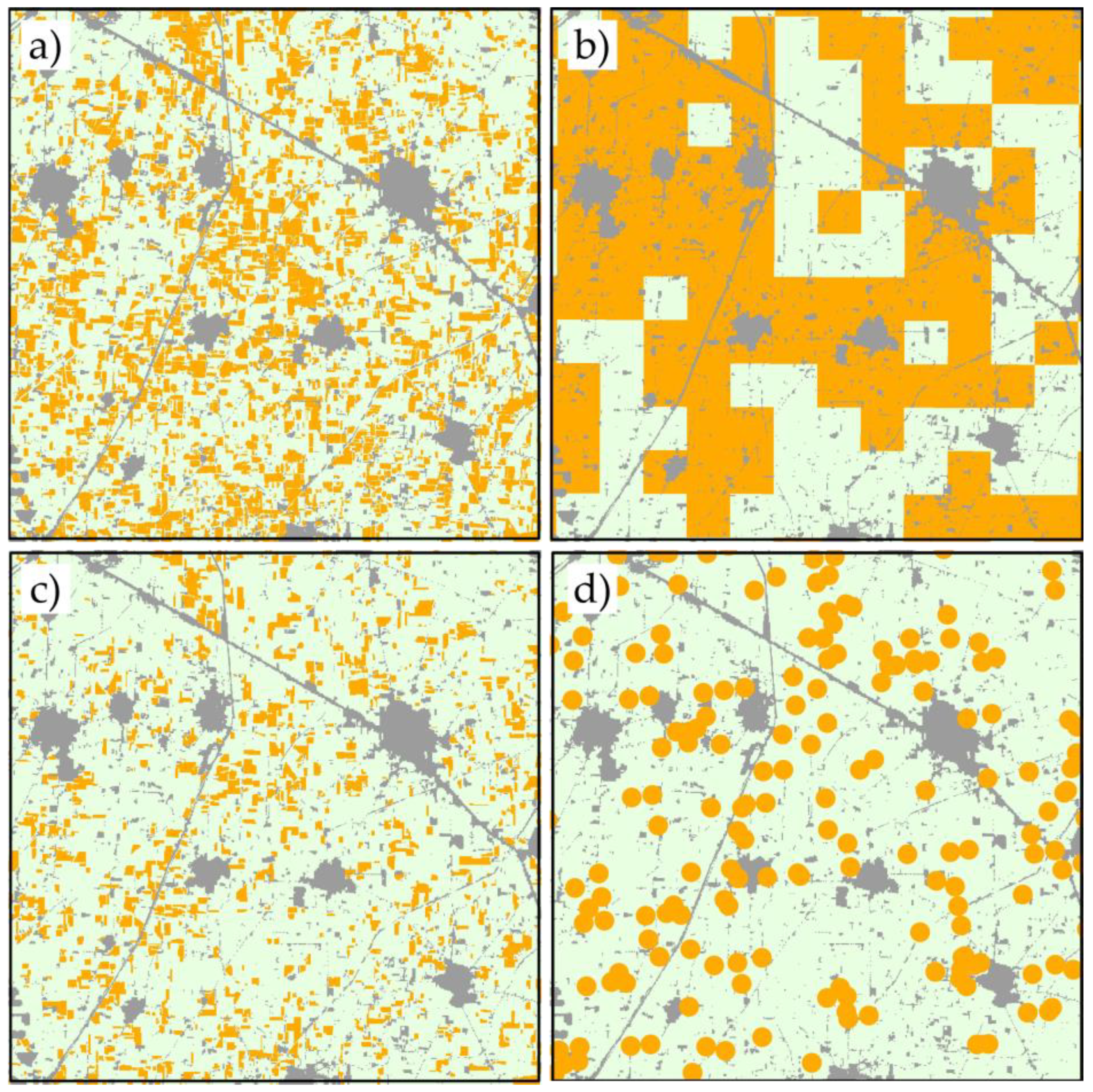
- Pitfall 1: Using data with inadequate spatial resolution to quantify CRB
- Pitfall 2: Using data with inadequate temporal resolution to quantify CRB
- Pitfall 3: Mapping CRB with ill-fitted signals
- Pitfall 4: Mapping CRB against the wrong comparison group
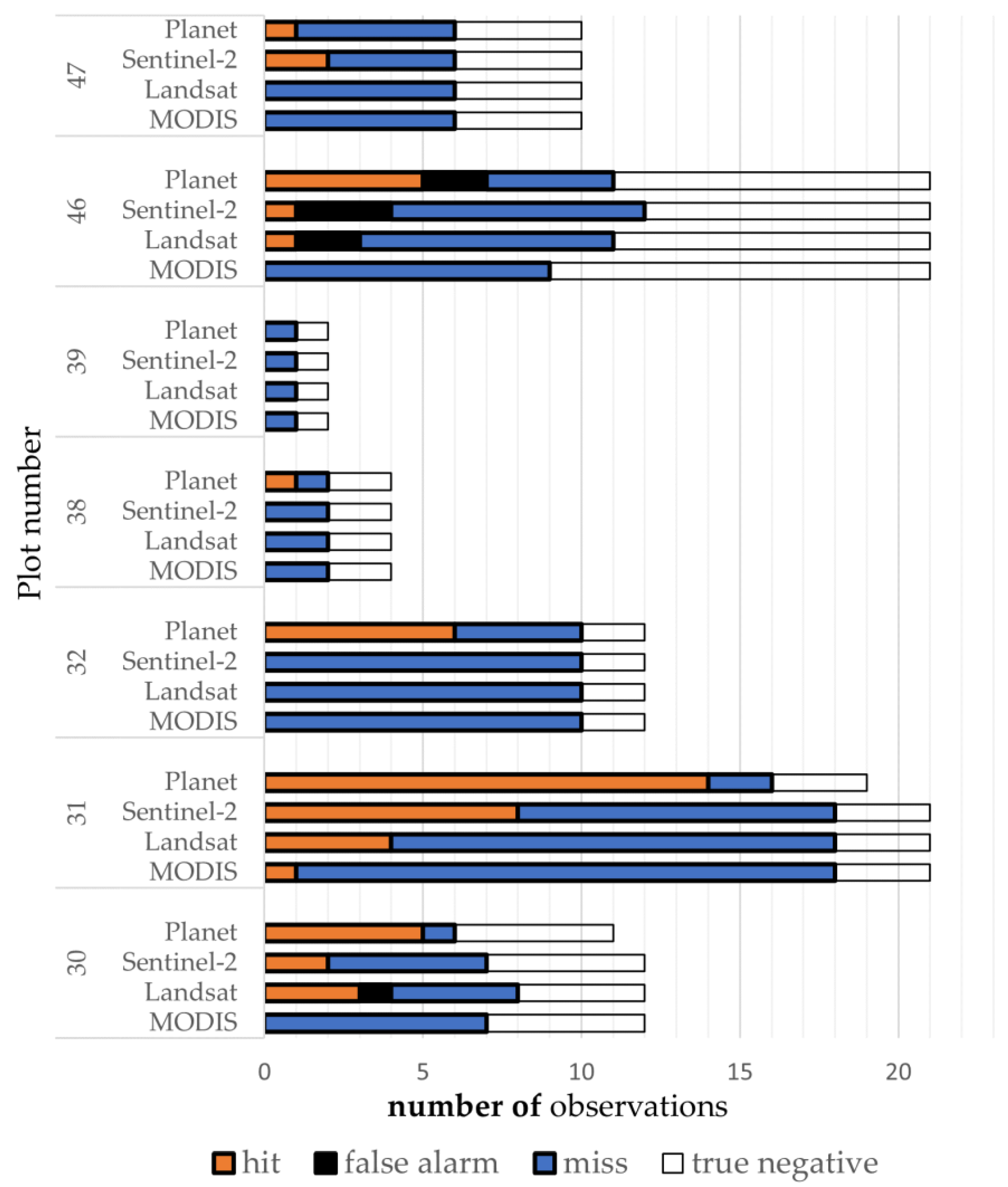
- Pitfall 5: Lack of adequate accuracy assessment
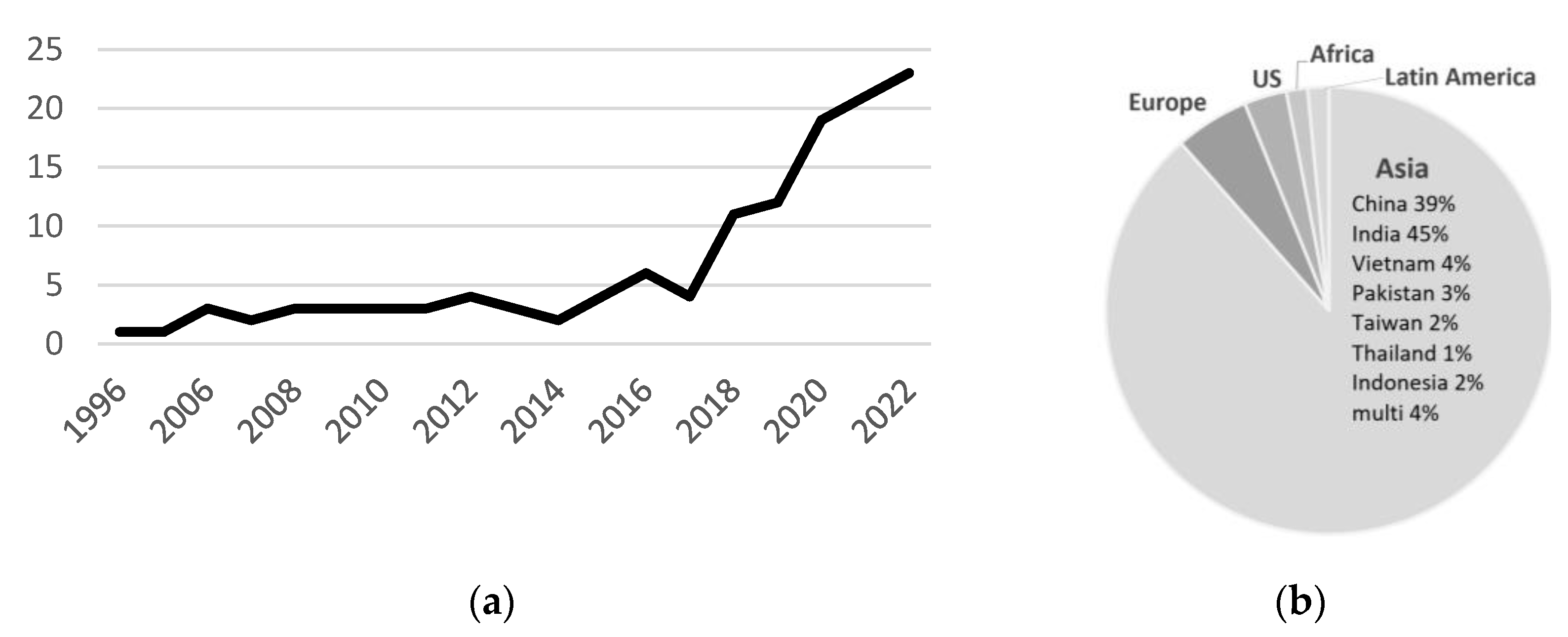
1.2. Literature Review
2. Materials and Methods
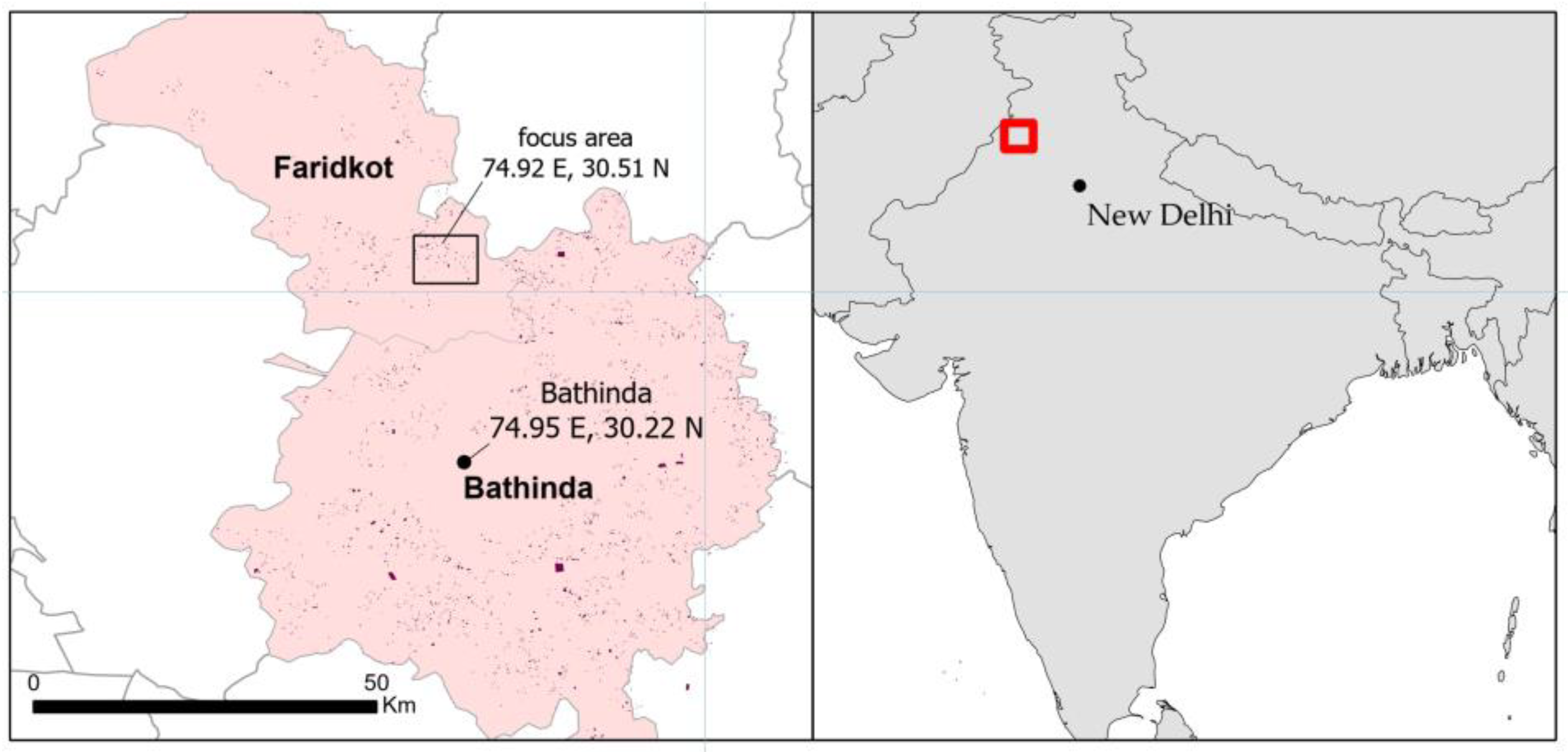
2.1. Validation Data from the Ground
2.2. Imagery and Products
2.3. Analysis Methods
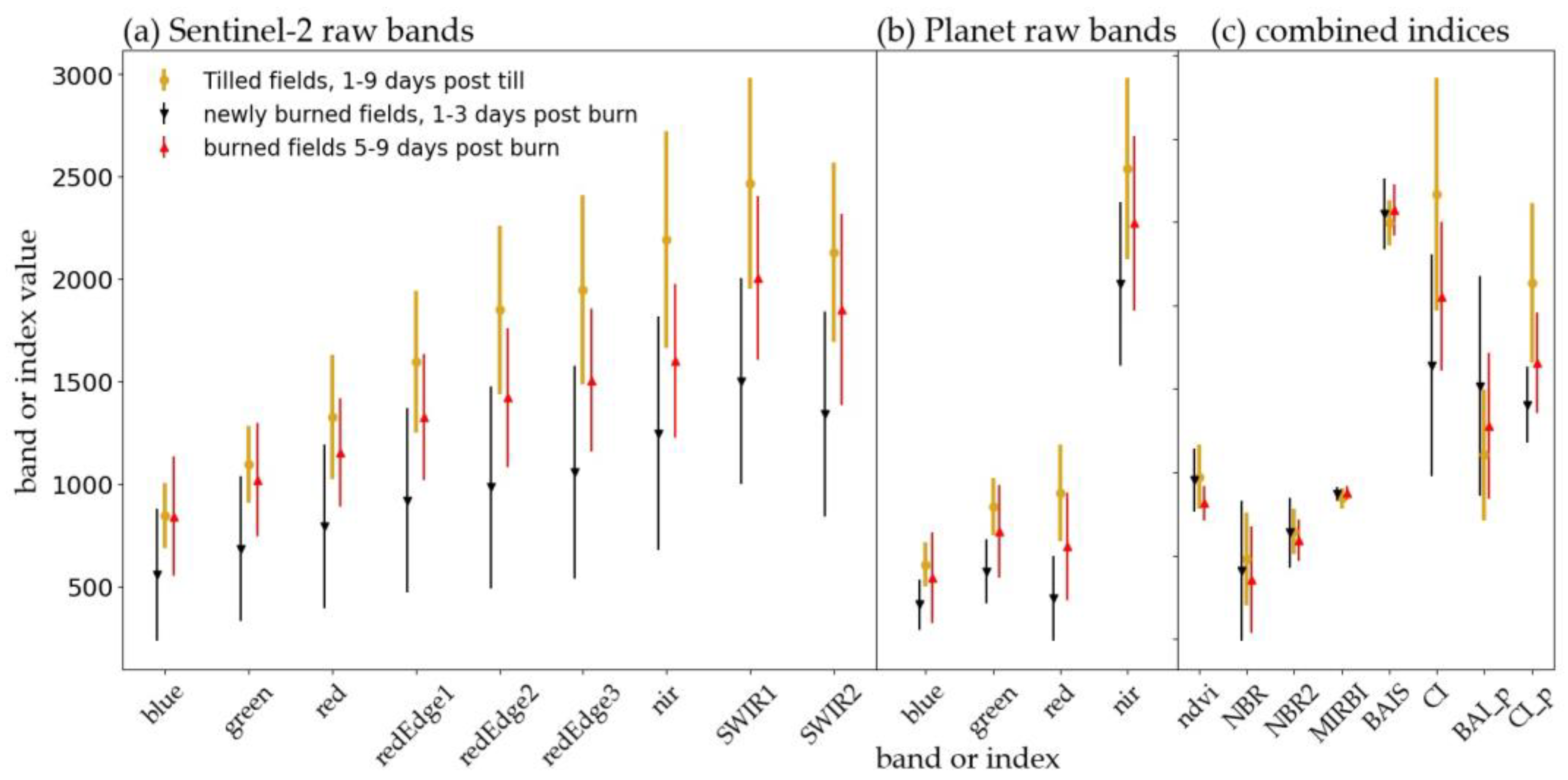
2.3.1. Separability Analysis and Signal-to-Noise Ratio
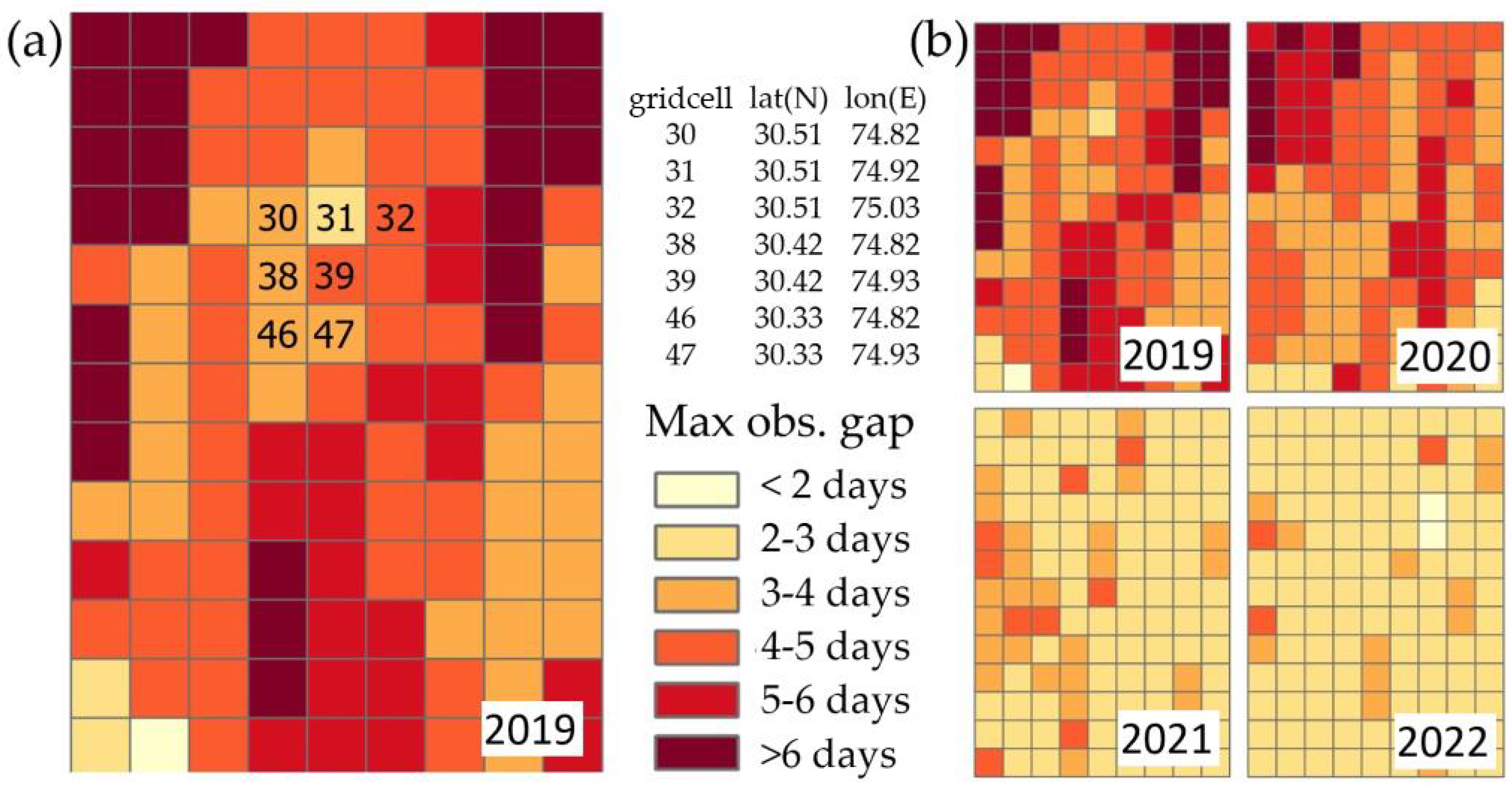
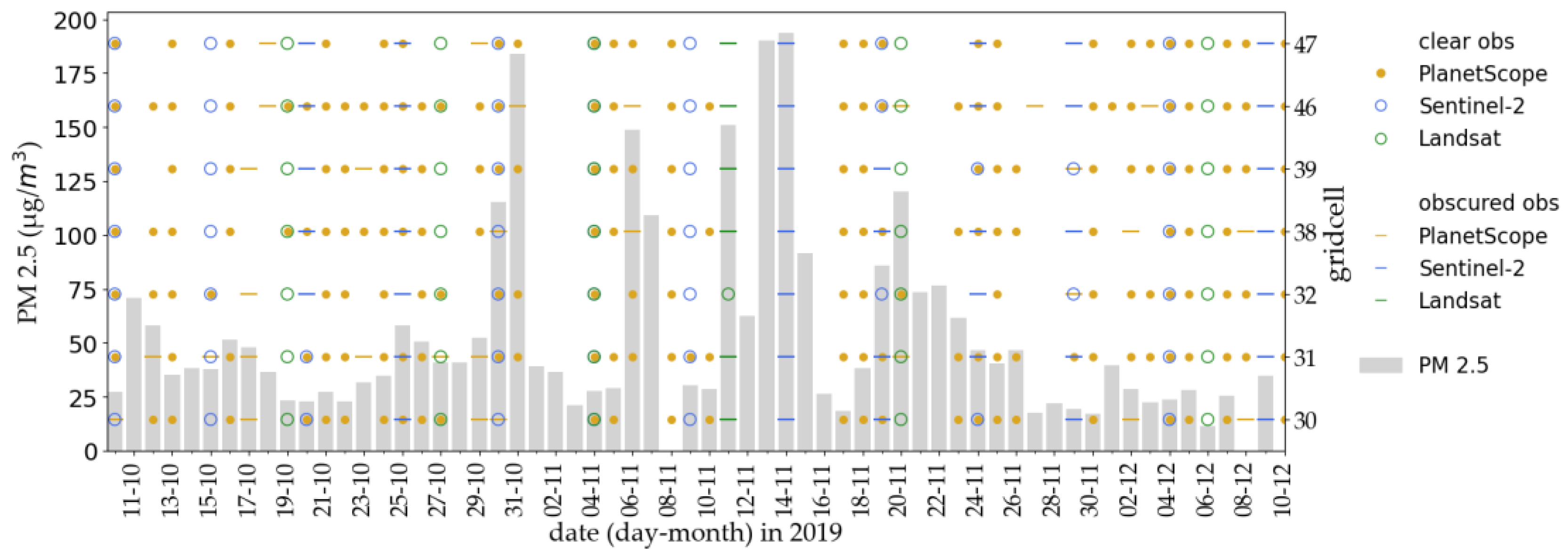
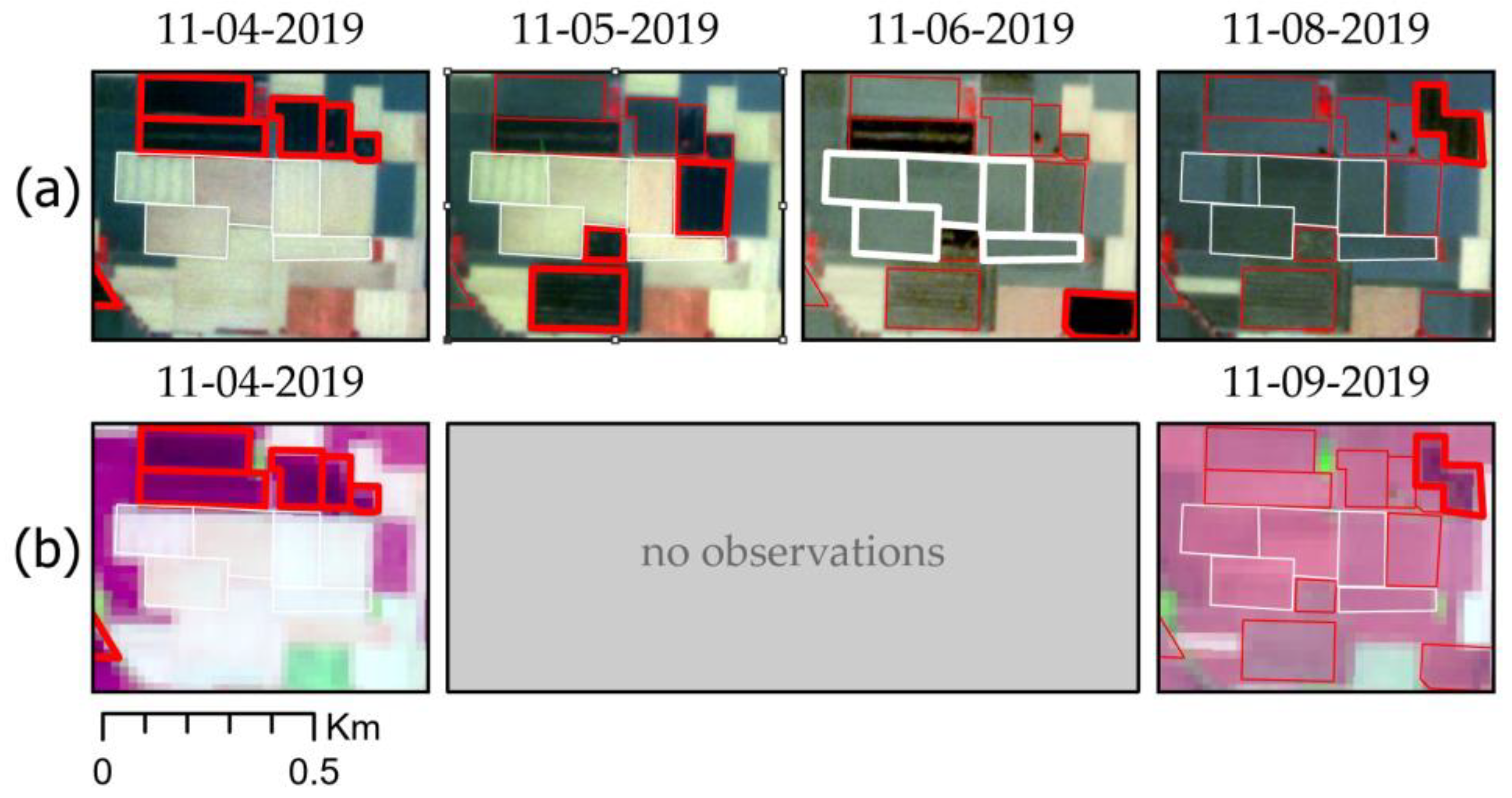
2.3.2. Estimating Detection Window and Observation Gaps
2.3.3. Burn Scar Time Series Dataset and Effect of Observation Gaps on Estimates of CRB
3. Results
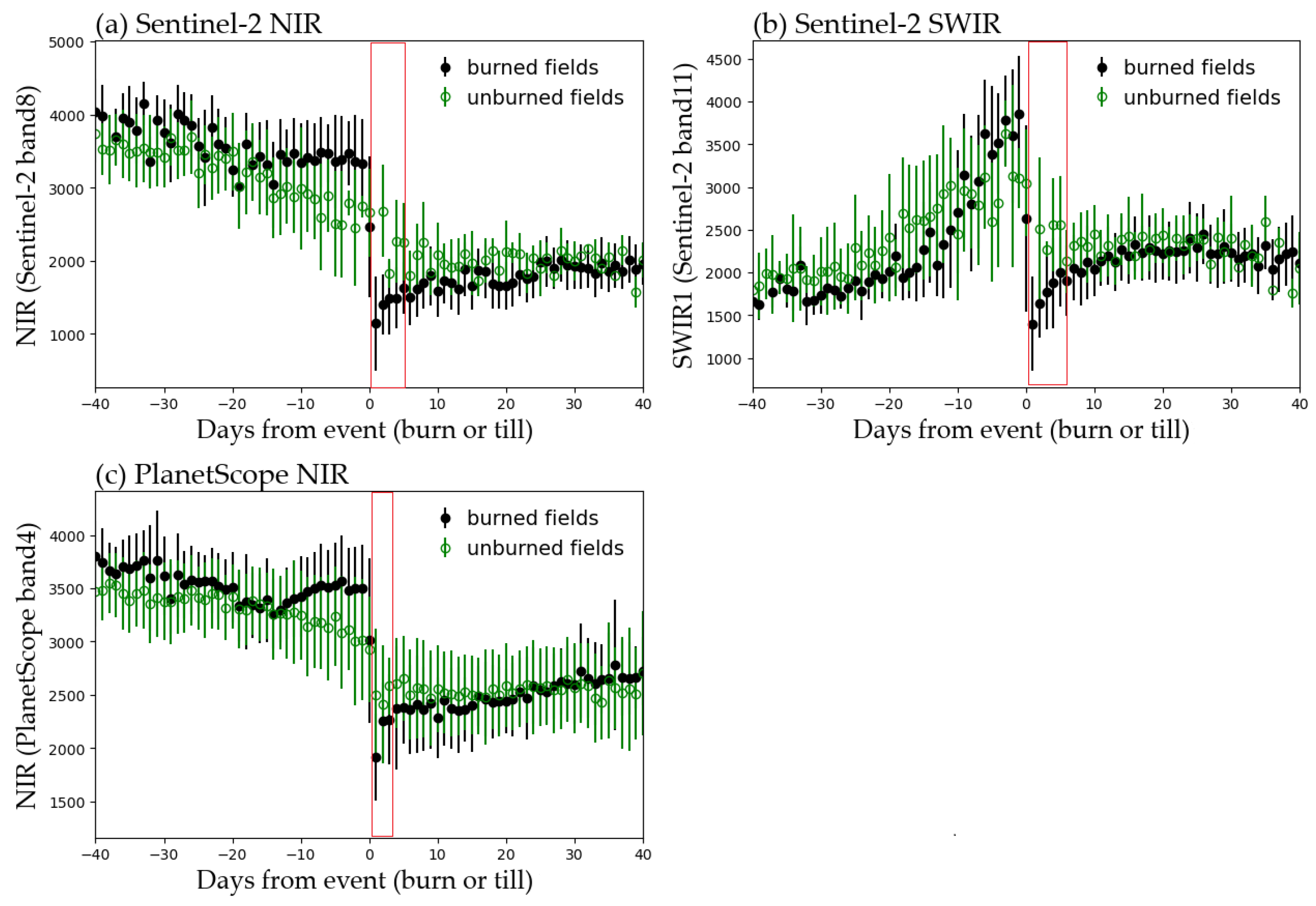
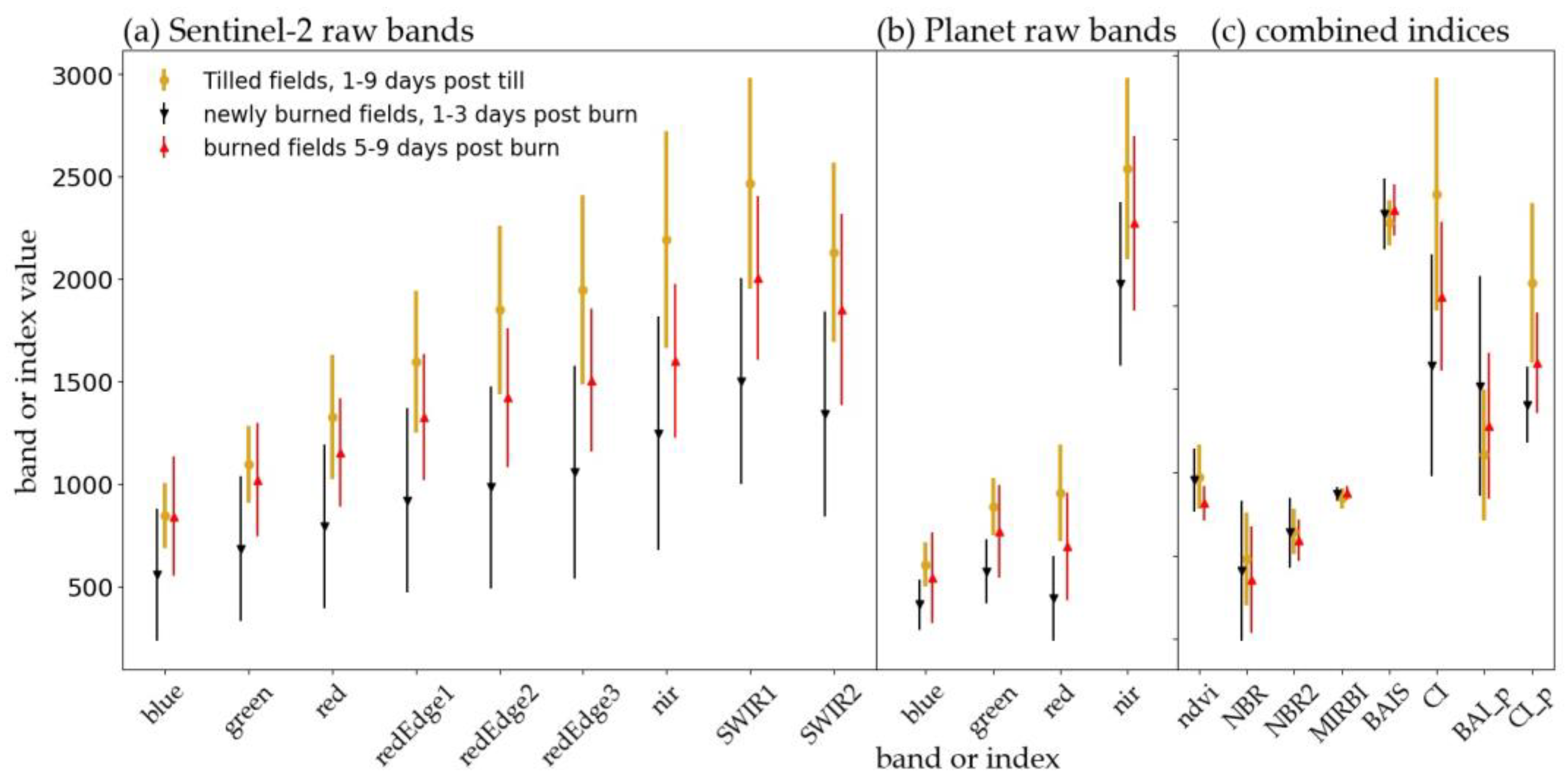
3.1. Separability, Signal-to-Noise Ratio, and Detection Window
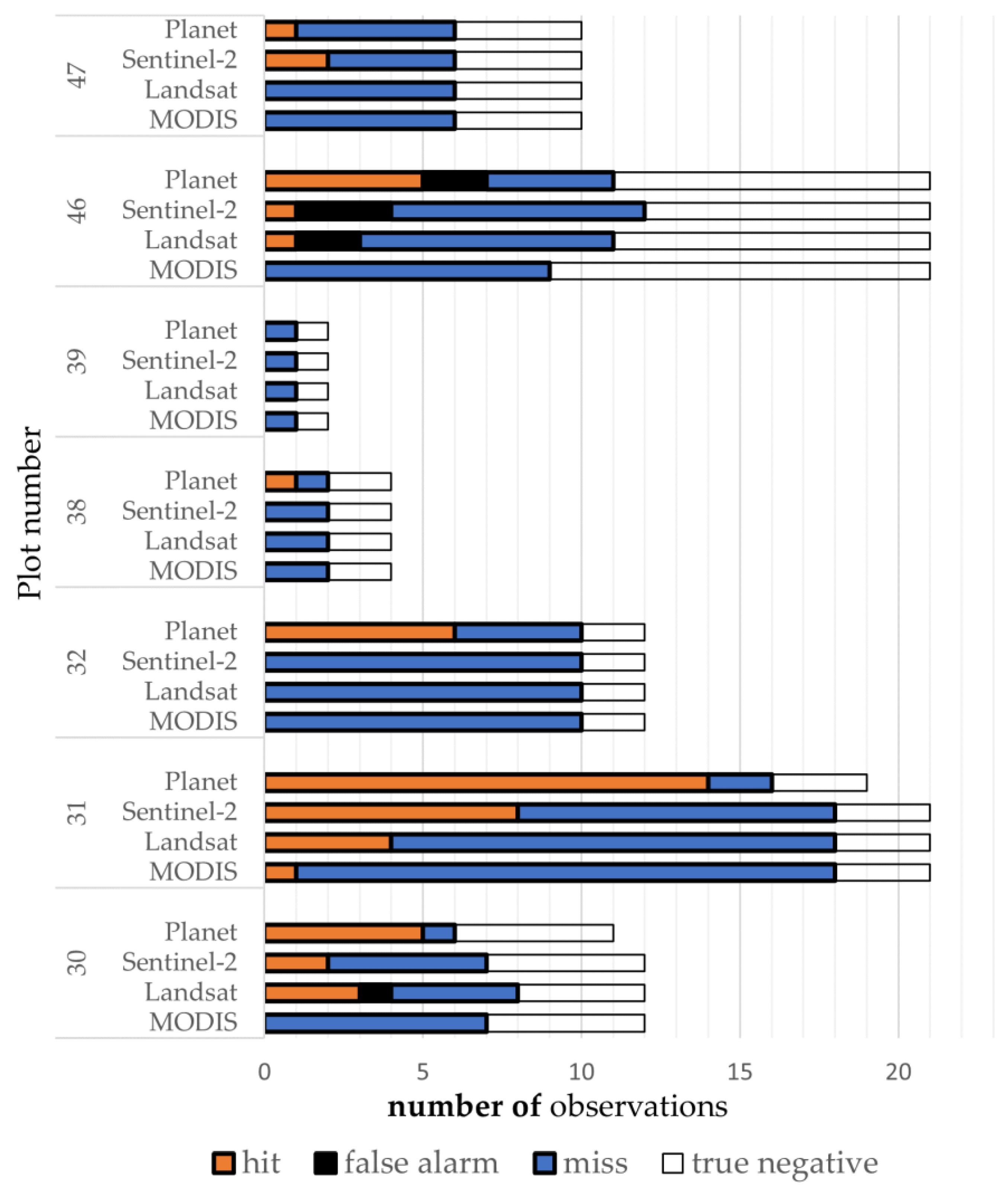
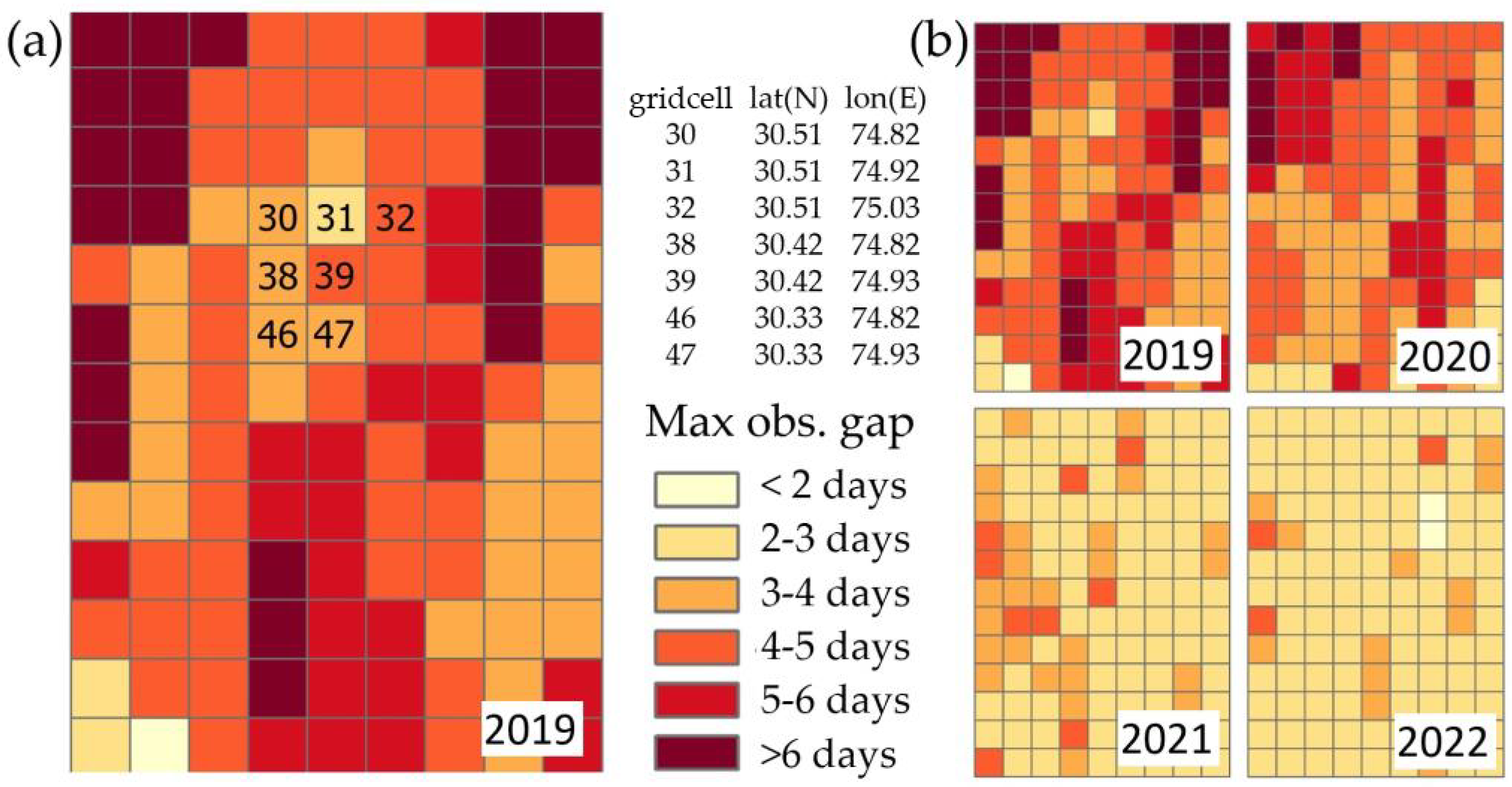
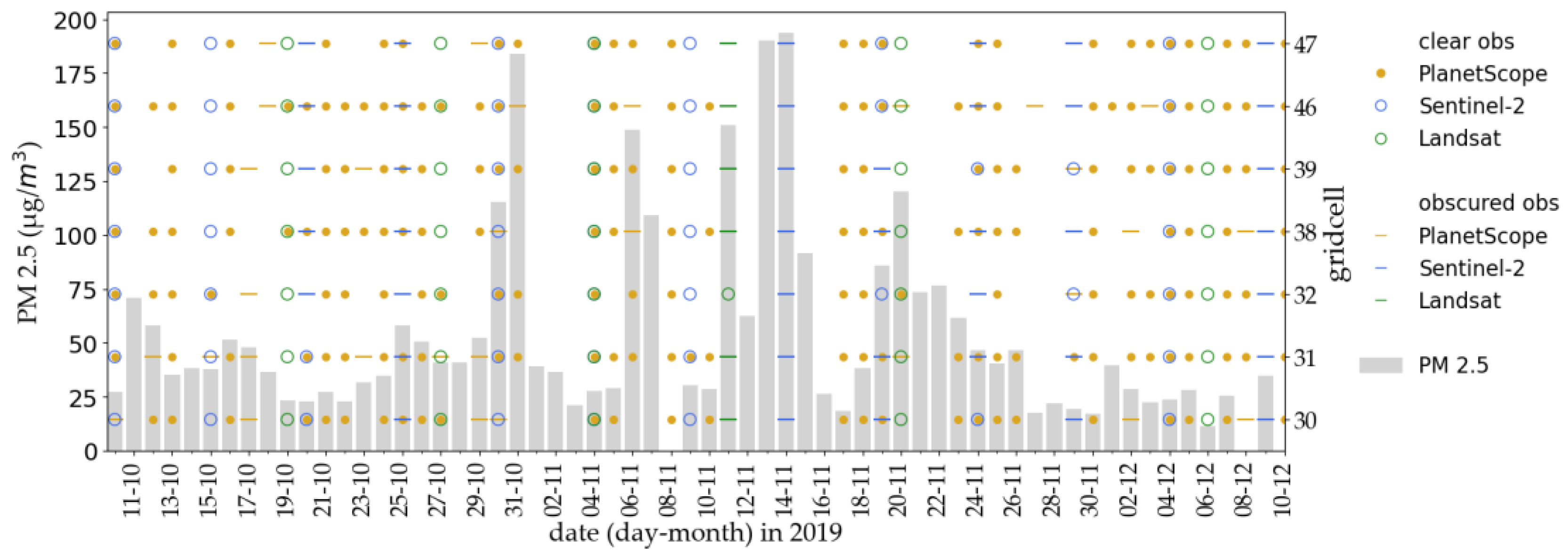
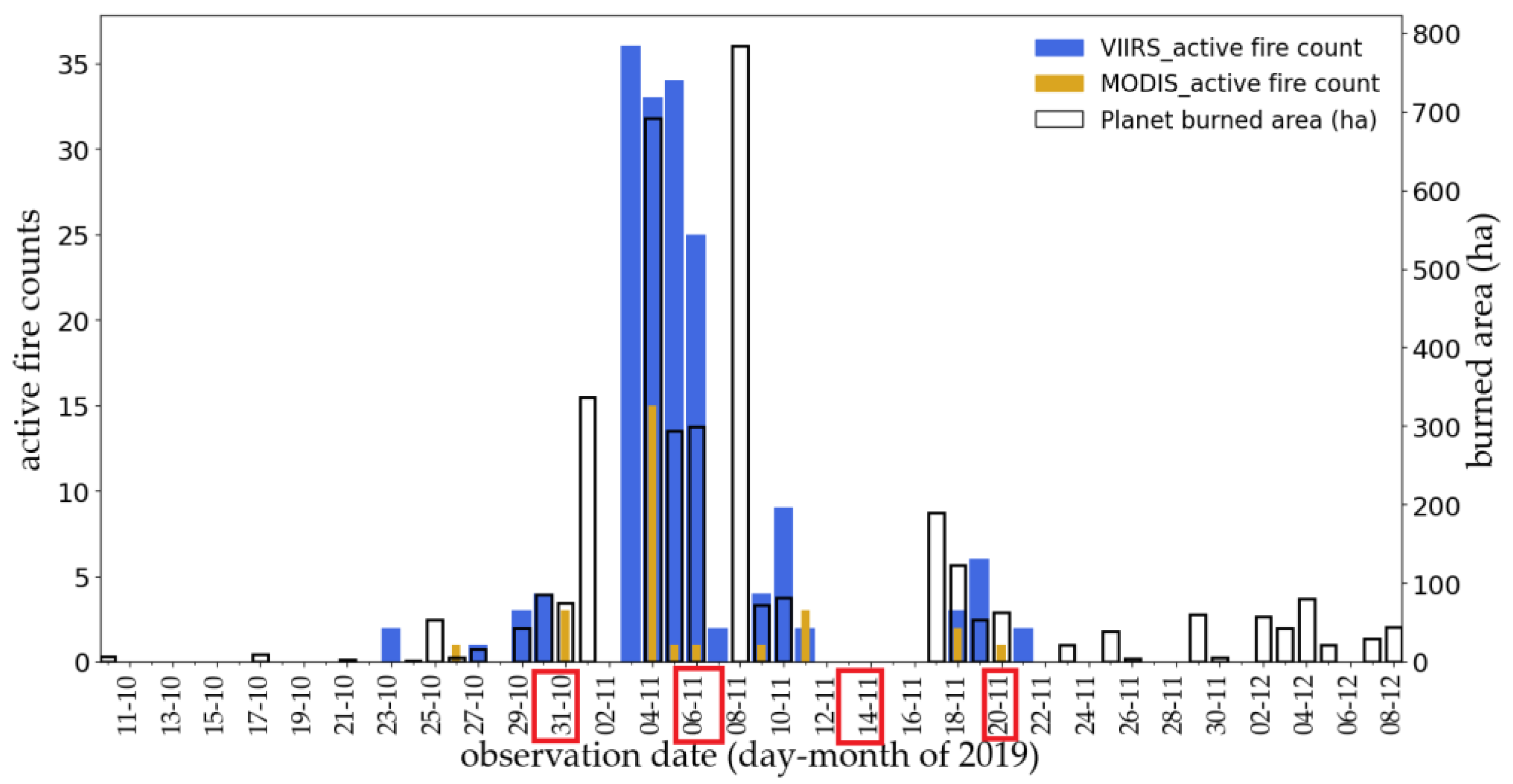
3.2. Observational Gaps
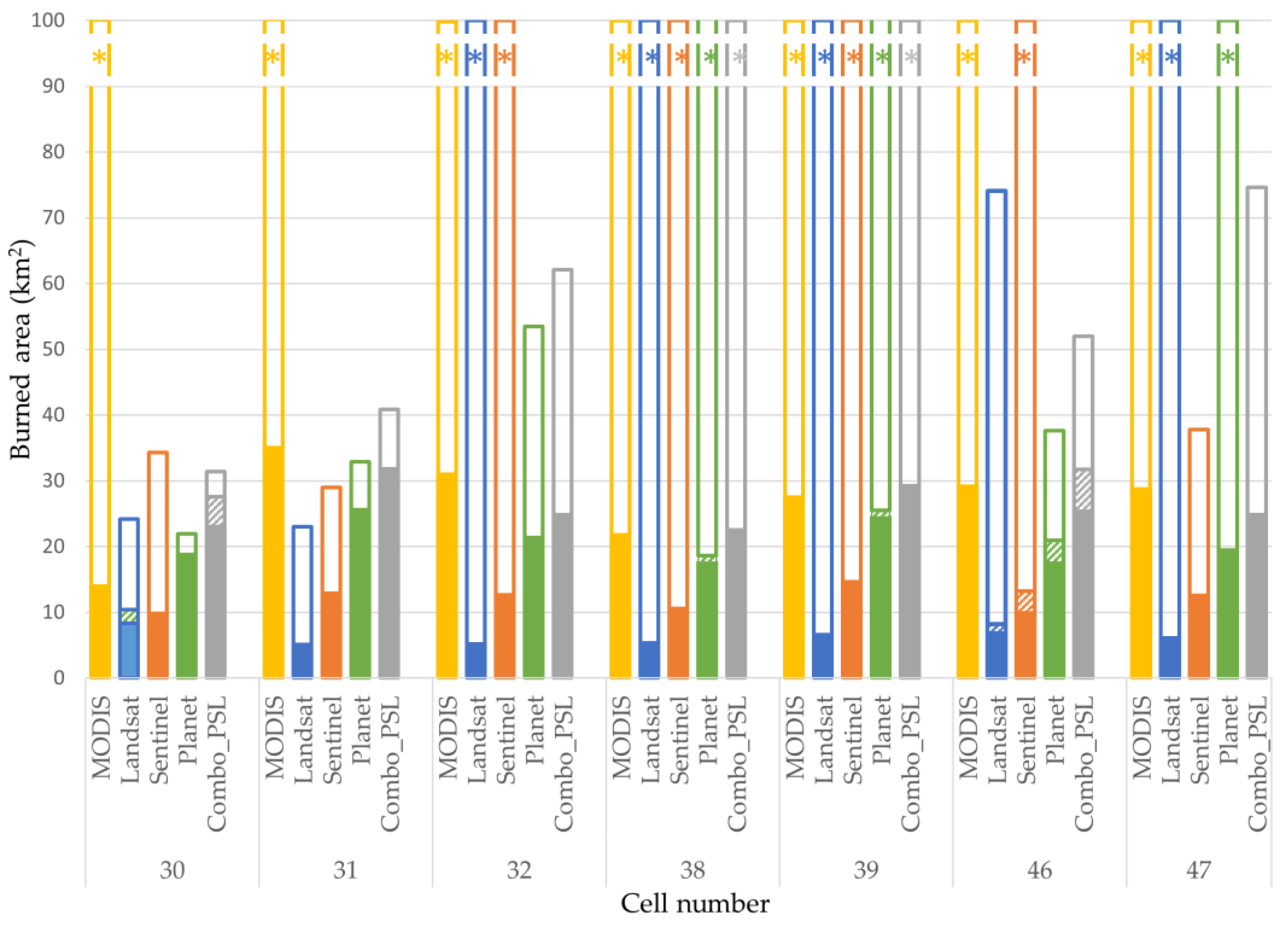
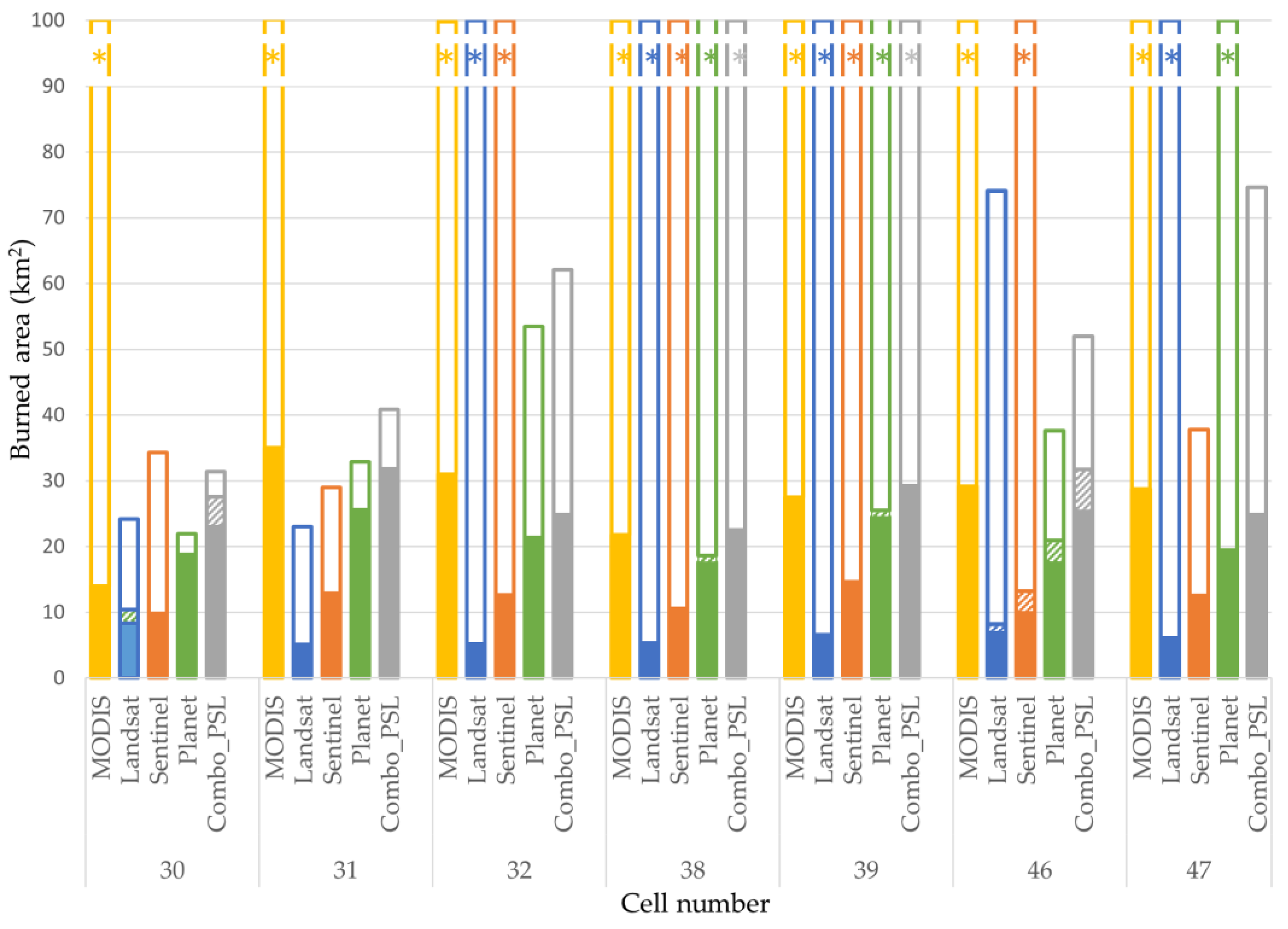
3.3. Effect of Resolution on Burned Area Estimates
4. Discussion
Supplementary Materials
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- World Health Organization. Overview of Methods to Assess Population Exposure to Ambient Air Pollution; World Health Organization: Geneva, Switzerland, 2023. [Google Scholar]
- Jethva, H.; Chand, D.; Torres, O.; Gupta, P.; Lyapustin, A.; Patadia, F. Agricultural Burning and Air Quality over Northern India: A Synergistic Analysis using NASA’s A-train Satellite Data and Ground Measurements. Aerosol Air Qual. Res. 2018, 18, 1756–1773. [Google Scholar] [CrossRef]
- Liu, T.; He, G.J.; Lau, A.K.H. Statistical evidence on the impact of agricultural straw burning on urban air quality in China. Sci. Total Environ. 2020, 711, 134633. [Google Scholar] [CrossRef]
- Ashraf, M.F.; Ahmad, R.U.; Tareen, H.K. Worsening situation of smog in Pakistan: A tale of three cities. Ann. Med. Surg. 2022, 79, 103947. [Google Scholar] [CrossRef]
- Chakrabarti, S.; Khan, M.T.K.; Avinash Roy, D.; Scott, S.P. Risk of acute respiratory infection from crop burning in India: Estimating disease burden and economic welfare from satellite and national health survey data for 250,000 persons (vol 48, pg. 1113, 2019). Int. J. Epidemiol. 2020, 49, 710–711. [Google Scholar] [CrossRef] [PubMed]
- Cusworth, D.H.; Mickley, L.J.; Sulprizio, M.P.; Liu, T.J.; Marlier, M.E.; DeFries, R.S.; Guttikunda, S.K.; Gupta, P. Quantifying the influence of agricultural fires in northwest India on urban air pollution in Delhi, India. Environ. Res. Lett. 2018, 13, 044018. [Google Scholar] [CrossRef]
- Day, M.; Pouliot, G.; Hunt, S.; Baker, K.R.; Beardsley, M.; Frost, G.; Mobley, D.; Simon, H.; Henderson, B.B.; Yelverton, T.; et al. Reflecting on progress since the 2005 NARSTO emissions inventory report. J. Air Waste Manag. Assoc. 2019, 69, 1023–1048. [Google Scholar] [CrossRef] [PubMed]
- McDuffie, E.E.; Martin, R.V.; Spadaro, J.V.; Burnett, R.; Smith, S.J.; O’Rourke, P.; Hammer, M.S.; van Donkelaar, A.; Bindle, L.; Shah, V.; et al. Source sector and fuel contributions to ambient PM2.5 and attributable mortality across multiple spatial scales. Nat. Commun. 2021, 12, 3594. [Google Scholar] [CrossRef]
- Rabha, S.; Saikia, B.K.; Singh, G.K.; Gupta, T. Meteorological Influence and Chemical Compositions of Atmospheric Particulate Matters in an Indian Urban Area. ACS Earth Space Chem. 2021, 5, 1686–1694. [Google Scholar] [CrossRef]
- Ravindra, K.; Singh, T.; Mor, S. Emissions of air pollutants from primary crop residue burning in India and their mitigation strategies for cleaner emissions. J. Clean. Prod. 2019, 208, 261–273. [Google Scholar] [CrossRef]
- Wang, L.L.; Jin, X.; Wang, Q.L.; Mao, H.Q.; Liu, Q.Y.; Weng, G.Q.; Wang, Y.S. Spatial and temporal variability of open biomass burning in Northeast China from 2003 to 2017. Atmos. Ocean. Sci. Lett. 2020, 13, 240–247. [Google Scholar] [CrossRef]
- He, G.J.; Liu, T.; Zhou, M.G. Straw burning, PM2.5, and death: Evidence from China. J. Dev. Econ. 2020, 145, 102468. [Google Scholar] [CrossRef]
- Jethva, H.; Torres, O.; Field, R.D.; Lyapustin, A.; Gautam, R.; Kayetha, V. Connecting Crop Productivity, Residue Fires, and Air Quality over Northern India. Sci. Rep. 2019, 9, 16594. [Google Scholar] [CrossRef] [PubMed]
- Liu, T.; Crowley, M.A. Detection and impacts of tiling artifacts in MODIS burned area classification. IOP SciNotes 2021, 2, 014003. [Google Scholar] [CrossRef]
- Badarinath, K.V.S.; Chand, T.R.K.; Prasad, V.K. Agriculture crop residue burning in the Indo-Gangetic Plains-A study using IRS-P6 AWiFS satellite data. Curr. Sci. 2006, 91, 1085–1089. [Google Scholar]
- Garg, T.; Jagnani, M.; Pullabhotla, H.K. Structural transformation and environmental externalities. arXiv 2022, arXiv:2212.02664. [Google Scholar]
- Singha, M.; Dong, J.W.; Ge, Q.S.; Metternicht, G.; Sarmah, S.; Zhang, G.L.; Doughty, R.; Lele, S.; Biradar, C.; Zhou, S.; et al. Satellite evidence on the trade-offs of the food-water-air quality nexus over the breadbasket of India. Glob. Environ. Change-Hum. Policy Dimens. 2021, 71, 102394. [Google Scholar] [CrossRef]
- Balwinder, S.; McDonald, A.J.; Srivastava, A.K.; Gerard, B. Tradeoffs between groundwater conservation and air pollution from agricultural fires in northwest India. Nat. Sustain. 2019, 2, 580–583. [Google Scholar] [CrossRef]
- Hou, L.L.; Chen, X.G.; Kuhn, L.N.; Huang, J.K. The effectiveness of regulations and technologies on sustainable use of crop residue in Northeast China. Energy Econ. 2019, 81, 519–527. [Google Scholar] [CrossRef]
- Chen, J.X.; Li, R.; Tao, M.H.; Wang, L.L.; Lin, C.Q.; Wang, J.; Wang, L.C.; Wang, Y.; Chen, L.F. Overview of the performance of satellite fire products in China: Uncertainties and challenges. Atmos. Environ. 2022, 268, 118838. [Google Scholar] [CrossRef]
- Walker, K.; Moscona, B.; Jack, K.; Jayachandran, S.; Kala, N.; Pande, R.; Xue, J.; Burke, M. Detecting Crop Burning in India using Satellite Data. arXiv 2022, arXiv:2209.10148. [Google Scholar]
- Thumaty, K.C.; Rodda, S.R.; Singhal, J.; Gopalakrishnan, R.; Jha, C.S.; Parsi, G.D.; Dadhwal, V.K. Spatio-temporal characterization of agriculture residue burning in Punjab and Haryana, India, using MODIS and Suomi NPP VIIRS data. Curr. Sci. 2015, 109, 1850–1855. [Google Scholar] [CrossRef]
- Liu, T.; Marlier, M.E.; Karambelas, A.; Jain, M.; Singh, S.; Singh, M.K.; Gautam, R.; DeFries, R.S. Missing emissions from post-monsoon agricultural fires in northwestern India: Regional limitations of MODIS burned area and active fire products. Environ. Res. Commun. 2019, 1, 011007. [Google Scholar] [CrossRef]
- Hall, J.V.; Zibtsev, S.V.; Giglio, L.; Skakun, S.; Myroniuk, V.; Zhuravel, O.; Goldammer, J.G.; Kussul, N. Environmental and political implications of underestimated cropland burning in Ukraine. Environ. Res. Lett. 2021, 16, 064019. [Google Scholar] [CrossRef]
- Bahsi, K.; Salli, B.; Kilic, D.; Sertel, E. Estimation of emissions from crop residue burning using remote sensing data. Int. J. Glob. Warm. 2019, 19, 94–105. [Google Scholar] [CrossRef]
- Jack, B.K.; Jayachandran, S.; Kala, N.; Pande, R. Money (not to) Burn: Payments for Ecosystem Services for Reduced Crop Residue Burning; (No. w30690) in Working Paper; National Bureau of Economic Research: Cambridge, MA, USA, 2022. [Google Scholar]
- Singh, G.; Gupta, M.K.; Chaurasiya, S.; Sharma, V.S.; Pimenov, D.Y. Rice straw burning: A review on its global prevalence and the sustainable alternatives for its effective mitigation. Environ. Sci. Pollut. Res. 2021, 28, 32125–32155. [Google Scholar] [CrossRef]
- Hall, J.V.; Argueta, F.; Giglio, L. Validation of MCD64A1 and FireCCI51 cropland burned area mapping in Ukraine. Int. J. Appl. Earth Obs. Geoinf. 2021, 102, 102443. [Google Scholar] [CrossRef]
- Liu, T.; Mickley, L.J.; Singh, S.; Jain, M.; DeFries, R.S.; Marlier, M.E. Crop residue burning practices across north India inferred from household survey data: Bridging gaps in satellite observations. Atmos. Environ. X 2020, 8, 100091. [Google Scholar] [CrossRef]
- Chuvieco, E.; Pettinari, M.L.; Centre for Environmental Data Analysis. ESA Fire Climate Change Initiative (Fire CCI) Dataset Collection. 2016. Available online: http://catalogue.ceda.ac.uk/uuid/bcef9e87740e4cbabc743d295afbe849 (accessed on 20 November 2023).
- Lizundia-Loiola, J.; Franquesa, M.; Boettcher, M.; Kirches, G.; Pettinari, M.L.; Chuvieco, E. Implementation of the Burned Area Component of Copernicus Climate Change Service; From MODIS to OLCI Data. Remote Sens. 2021, 13, 4295. [Google Scholar] [CrossRef]
- Giglio, L.; Randerson, J.T.; van der Werf, G.R. Analysis of daily, monthly, and annual burned area using the fourth-generation global fire emissions database (GFED4). J. Geophys. Res. Biogeosciences 2013, 118, 317–328. [Google Scholar] [CrossRef]
- Stavrakou, T.; Muller, J.F.; Bauwens, M.; De Smedt, I.; Lerot, C.; Van Roozendael, M.; Coheur, P.F.; Clerbaux, C.; Boersma, K.F.; van der A, R.; et al. Substantial Underestimation of Post-Harvest Burning Emissions in the North China Plain Revealed by Multi-Species Space Observations. Sci. Rep. 2016, 6, 32307. [Google Scholar] [CrossRef]
- Holden, Z.; Smith, A.M.S.; Morgan, P.; Rollins, M.G.; Gessler, P.E. Evaluation of Novel Thermally Enhanced Spectral Indices for Mapping Fire Perimeters and Comparisons with Fire Atlas Data. Int. J. Remote Sens. 2005, 26, 4801–4808. [Google Scholar] [CrossRef]
- Liu, S.F.; Wang, S.D.; Chi, T.H.; Wen, C.C.; Wu, T.X.; Wang, D.C. An improved combined vegetation difference index and burn scar index approach for mapping cropland burned areas using combined data from Landsat 8 multispectral and thermal infrared bands. Int. J. Wildland Fire 2020, 29, 499–512. [Google Scholar] [CrossRef]
- Daldegan, G.A.; Roberts, D.A.; Ribeiro, F.D.F. Spectral mixture analysis in Google Earth Engine to model and delineate fire scars over a large extent and a long time-series in a rainforest-savanna transition zone. Remote Sens. Environ. 2019, 232, 111340. [Google Scholar] [CrossRef]
- Fraser, R.H.; Van der Sluijs, J.; Hall, R.J. Calibrating Satellite-Based Indices of Burn Severity from UAV-Derived Metrics of a Burned Boreal Forest in NWT, Canada. Remote Sens. 2017, 9, 279. [Google Scholar] [CrossRef]
- Chhapariya, K.; Kumar, A.; Upadhyay, P. A fuzzy machine learning approach for identification of paddy stubble burnt fields. Spat. Inf. Res. 2021, 29, 319–329. [Google Scholar] [CrossRef]
- Randerson, J.T.; Chen, Y.; van der Werf, G.R.; Rogers, B.M.; Morton, D.C. Global burned area and biomass burning emissions from small fires. J. Geophys. Res.-Biogeosci. 2012, 117, G04012. [Google Scholar] [CrossRef]
- Yadav, M.; Sharma, M.P.; Prawasi, R.; Khichi, R.; Kumar, P.; Mandal, V.P.; Salim, A.; Hooda, R.S. Estimation of Wheat/Rice Residue Burning Areas in Major Districts of Haryana, India, Using Remote Sensing Data. J. Indian Soc. Remote Sens. 2014, 42, 343–352. [Google Scholar] [CrossRef]
- McCarty, J.L.; Korontzi, S.; Justice, C.O.; Loboda, T. The spatial and temporal distribution of crop residue burning in the contiguous United States. Sci. Total Environ. 2009, 407, 5701–5712. [Google Scholar] [CrossRef]
- Roteta, E.; Bastarrika, A.; Padilla, M.; Storm, T.; Chuvieco, E. Development of a Sentinel-2 burned area algorithm: Generation of a small fire database for sub-Saharan Africa. Remote Sens. Environ. 2019, 222, 1–17. [Google Scholar] [CrossRef]
- Olofsson, P.; Foody, G.M.; Herold, M.; Stehman, S.V.; Woodcock, C.E.; Wulder, M.A. Good practices for estimating area and assessing accuracy of land change. Remote Sens. Environ. 2014, 148, 42–57. [Google Scholar] [CrossRef]
- Boschetti, L.; Roy, D.P.; Justice, C.O. International Global Burned Area Satellite Product Validation Protocol; Part I–production and standardization of validation reference data; Committee on Earth Observation Satellites: Maryland, MD, USA, 2009. [Google Scholar]
- McCarty, J.L.; Loboda, T.; Trigg, S. A hybrid remote sensing approach to quantifying crop residue burning in the United States. Appl. Eng. Agric. 2008, 24, 515–527. [Google Scholar] [CrossRef]
- Chang, C.H.; Liu, C.C.; Tseng, P.Y. Emissions Inventory for Rice Straw Open Burning in Taiwan Based on Burned Area Classification and Mapping Using Formosat-2 Satellite Imagery. Aerosol Air Qual. Res. 2013, 13, 474–487. [Google Scholar] [CrossRef]
- Kington, J.; Collison, A. Scene Level Normalization and Harmonization of Planet Dove Imagery; Planet Labs Inc.: San Francisco, CA, USA, 2022. [Google Scholar]
- Kaufman, Y.J.; Remer, L.A. Detecting forests using MID-IR reflectance—An application for aerosol studies. IEEE Trans. Geosci. Remote Sens. 1994, 32, 672–683. [Google Scholar] [CrossRef]
- Huang, H.Y.; Roy, D.P.; Boschetti, L.; Zhang, H.K.K.; Yan, L.; Kumar, S.S.; Gomez-Dans, J.; Li, J. Separability Analysis of Sentinel-2A Multi-Spectral Instrument (MSI) Data for Burned Area Discrimination. Remote Sens. 2016, 8, 873. [Google Scholar] [CrossRef]
- Broto, V.C.; Burningham, K.; Carter, C.; Elghali, L. Stigma and Attachment: Performance of Identity in an Environmentally Degraded Place. Soc. Nat. Resour. Int. J. 2010, 23, 952–968. [Google Scholar] [CrossRef]
- Sharma, D.; Mauzerall, D. Analysis of Air Pollution Data in India between 2015 and 2019. Aerosol Air Qual. Res. 2022, 22, 210204. [Google Scholar] [CrossRef]
- Vijayakuman, K.; Safai, P.D.; Devara, P.C.S.; Rao, S.V.B.; Jayasankar, C.K. Effects of agriculture crop residue burning on aerosol properties and long-range transport over northern India: A study using satellite data and model simulations. Atmos. Res. 2016, 178–179, 155–163. [Google Scholar] [CrossRef]
- Cheng, Z.; Wang, S.; Fu, X.; Watson, J.G.; Jiang, J.; Fu, Q.; Chen, C.; Xu, B.; Yu, J.; Chow, J.C.; et al. Impact of biomass burning on haze pollution in the Yangtze River delta, China: A case study in summer. Atmos. Chem. Phys. 2011, 14, 4573–4585. [Google Scholar] [CrossRef]
- Ravindra, K.; Singh, T.; Sinha, V.; Sinha, B.; Paul, S.; Attri, S.D.; Mor, S. Appraisal of regional haze event and its relationship with PM2.5 concentration, crop residue burning and meteorology in Chandigarh, India. Chemosphere 2021, 273, 128562. [Google Scholar] [CrossRef]
- Deshpande, M.V.; Pillai, D.; Jain, M. Agricultural burned area detection using an integrated approach utilizing multi spectral instrument based fire and vegetation indices from Sentinel-2 satellite. Methodsx 2022, 9, 101741. [Google Scholar] [CrossRef]
- Padilla, M.; Stehman, S.V.; Chuvieco, E. Validation of the 2008 MODIS-MCD45 global burned area product using stratified random sampling. Remote Sens. Environ. 2014, 144, 187–196. [Google Scholar] [CrossRef]
- Zhang, S.M.; Zhao, H.; Wu, Z.; Tan, L. Comparing the Ability of Burned Area Products to Detect Crop Residue Burning in China. Remote Sens. 2022, 14, 693. [Google Scholar] [CrossRef]
- Liu, J.X.; Wang, D.; Maeda, E.E.; Pellikka, P.K.; Heiskanen, J. Mapping Cropland Burned Area in Northeastern China by Integrating Landsat Time Series and Multi-Harmonic Model. Remote Sens. 2021, 13, 5131. [Google Scholar] [CrossRef]
- Liu, T.; Mickley, L.J.; Gautam, R.; Singh, M.K.; DeFries, R.S.; Marlier, M.E. Detection of delay in post-monsoon agricultural burning across Punjab, India: Potential drivers and consequences for air quality. Environ. Res. Lett. 2020, 16, 014014. [Google Scholar] [CrossRef]
- Deshpande, M.V.; Pillai, D.; Jain, M. Detecting and quantifying residue burning in smallholder systems: An integrated approach using Sentinel-2 data. Int. J. Appl. Earth Obs. Geoinf. 2022, 108, 102761. [Google Scholar] [CrossRef]
- Ban, Y.; Zhang, P.; Nascetti, A.; Bevington, A.R.; Wulder, M.A. Near Real-Time Wildfire Progression Monitoring with Sentinel-1 SAR Time Series and Deep Learning. Sci. Rep. 2020, 10, 1322. [Google Scholar] [CrossRef]
- Arasakusuma, S.; Kusuma, S.S.; Vetrita, Y.; Prasasti, I.; Arief, R. Monthly Burned-Area Mapping Using Multi-Sensor Integration of Sentinel-1 and Sentinel-2 and Machine Learning: Case Study of 2019′s Fire Events in South Sumatra Province, Indonesia. Remote Sens. Appl. Soc. Environ. 2022, 27, 100790. [Google Scholar]
- Gupta, R. Low-hanging fruit in black carbon mitigation: Crop residue burning in South Asia. Clim. Change Econ. 2014, 5, 1450012. [Google Scholar] [CrossRef]
- Kaur, A.; Grover, D.K. Happy Seeder Technology in Punjab: A Discriminant Analysis. Indian J. Econ. Dev. 2017, 13, 123–128. [Google Scholar] [CrossRef]
- Shyamsundar, P.; Springer, N.P.; Tallis, H.; Polasky, S.; Jat, M.L.; Sidhu, H.S.; Krishnapriya, P.P.; Skiba, N.; Ginn, W.; Ahuja, V.; et al. Fields on fire: Alternatives to crop residue burning in India. Science 2019, 365, 536–538. [Google Scholar] [CrossRef]
- Sun, L.; Yang, L.; Xia, X.A.; Wang, D.D.; Zhang, T.N. Climatological Aspects of Active Fires in Northeastern China and Their Relationship to Land Cover. Remote Sens. 2022, 14, 2316. [Google Scholar] [CrossRef]
- Yang, G.Y.; Zhao, H.M.; Tong, D.Q.; Xiu, A.J.; Zhang, X.L.; Gao, C. Impacts of post-harvest open biomass burning and burning ban policy on severe haze in the Northeastern China. Sci. Total. Environ. 2020, 716, 136517. [Google Scholar] [CrossRef] [PubMed]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Sensor/Product | #Studies a | Res (m) | Revisit | Available |
|---|---|---|---|---|
| MODIS_BurnedArea | 25 | 500 | daily | 2000–present |
| MODIS_ActiveFire | 65 | 1000 | daily | 2012–present |
| MODIS_custom | 4 | 500 | daily | 2000–present |
| VIIRS_ActiveFire | 16 | 375 | daily | 2012–present |
| Landsat | 6 | 30 | 8–16 days | 1982–present |
| Himawari-8 | 4 | 2000 | 10 min | 2014–present |
| Sentinel-2 | 3 | 10–30 | 7 days (2017) | 2015–present |
| Sentinel-1 | 3 | 10 | 12 days | 2014–present |
| AWiFS | 2 | 56 | 5 days | 2003–present |
| LISS-3 | 2 | 24 | 24 days | 2003–present |
| Formosat-2 | 2 | 2–8 | daily c | 2004–present |
| AVHRR | 1 | 1100 | daily | 1981–present |
| PlanetScope | 4 b | 3 | daily—7 days d | 2017–present |
| composite products | ||||
| Fire CCI (MODIS) | 2 | 250 | daily | 1982–2019 |
| L3JRC (SPOT) | 2 | 1000 | daily | 2000–2007 |
| GBA2000 (SPOT) | 1 | 1000 | daily | 2000 |
| Indices without SWIR Band (Can Use with PlanetScope) | |
| Normalized Difference Vegetation Index (NDVI) | |
| Burn Area Index (BAI) | |
| Char Index (CI) | |
| Indices with SWIR band (Sentinel and Landsat only) | |
| Normalized Burn Index (NBR) | |
| Normalized Burn Index 2 (NBR2) | |
| Mid Infrared Bispectral Index (MIRBI) | |
| Burn Scar Index (BSI) | |
| Burn Area Indexfor Sentinel (BAI_S) | |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Walker, K. Overcoming Common Pitfalls to Improve the Accuracy of Crop Residue Burning Measurement Based on Remote Sensing Data. Remote Sens. 2024, 16, 342. https://doi.org/10.3390/rs16020342
Walker K. Overcoming Common Pitfalls to Improve the Accuracy of Crop Residue Burning Measurement Based on Remote Sensing Data. Remote Sensing. 2024; 16(2):342. https://doi.org/10.3390/rs16020342
Chicago/Turabian StyleWalker, Kendra. 2024. "Overcoming Common Pitfalls to Improve the Accuracy of Crop Residue Burning Measurement Based on Remote Sensing Data" Remote Sensing 16, no. 2: 342. https://doi.org/10.3390/rs16020342
APA StyleWalker, K. (2024). Overcoming Common Pitfalls to Improve the Accuracy of Crop Residue Burning Measurement Based on Remote Sensing Data. Remote Sensing, 16(2), 342. https://doi.org/10.3390/rs16020342